Removing artefacts from color and contrast modifications
Julien
Rabin (1) , Julie Delon (2) and Yann
Gousseau (2)
(1) CMLA, École Normale Supérieure de Cachan
(2) CNRS LTCI, Télécom ParisTech
(1) CMLA, École Normale Supérieure de Cachan
(2) CNRS LTCI, Télécom ParisTech
This work
is concerned with the modification of the gray level or color
distribution of digital images. A common drawback of classical methods
aiming at such modifications is the
revealing of artefacts or the attenuation of
details and textures.
In this work we propose a generic filtering method enabling, given the original image and the radiometrically corrected one, to suppress artefacts while preserving details. The approach relies on the key observation that artefacts correspond to spatial irregularity of the so-called transportation map, defined as the differencebetween the original and the corrected image. The proposed method draws on the non-local Yaroslavsky filter to regularize the transportation map. The eff iciency of the method is shown on various radiometric modifications:
contrast equalization, midway histogram, color enhancement and color transfer.
For more details, see [1] and [2].
In this work we propose a generic filtering method enabling, given the original image and the radiometrically corrected one, to suppress artefacts while preserving details. The approach relies on the key observation that artefacts correspond to spatial irregularity of the so-called transportation map, defined as the differencebetween the original and the corrected image. The proposed method draws on the non-local Yaroslavsky filter to regularize the transportation map. The eff iciency of the method is shown on various radiometric modifications:
contrast equalization, midway histogram, color enhancement and color transfer.
For more details, see [1] and [2].
Description:
Notations
Principle
Experimental settings
For more details, see [1] and [2].
• Let u : Ω → R^n be a discrete image, with n = 1 for a gray level image, n = 3 for a color image, and where Ω ⊂ Z^2 is the bounded image domain.
• Let T(u) be the image after color or contrast modification (Histogram equalization, color transfer, gamma transform, etc).
• We define M(u) := T(u) − u as the transportation map of the image u.
• Let T(u) be the image after color or contrast modification (Histogram equalization, color transfer, gamma transform, etc).
• We define M(u) := T(u) − u as the transportation map of the image u.
Principle
The image T(u) often exhibits some unpleasant artefacts, such as JPEG blocs, color inconsistancies, noise enhancement or loss of details (texture washing).
We propose to regularize the transportation map M thanks to the operator Y_u, a weighted average with weights depending on the similarity of pixels in the original image u. The effect of this operator on an image v : Ω → R^n with n ≥ 1 is defined as
We propose to regularize the transportation map M thanks to the operator Y_u, a weighted average with weights depending on the similarity of pixels in the original image u. The effect of this operator on an image v : Ω → R^n with n ≥ 1 is defined as
Y_u (v) : x ∈ Ω → R^n = 1 / c(x) * Σ_{y ∈ N (x)} v(y) · w_u (x, y)
with weights w_u (x, y) = exp { || u(x)−u(y) ||^2 / σ^2 },
where ||.|| stands for the Euclidean distance in R^n ,
where N (x) = x+N (0) ⊂ Ω with N (0) a spatial neighborhood of 0,
where σ is a tuning parameter of the method and
C(x) is the normalization constant c(x) = Σ_{y ∈ N (x)} w_u (x, y) .
Observe that if we apply Y_u to the image u, we obtain the Yaroslavsky filter.
The regularization of the image T(u), referred to as Transportation Map Regularization (TMR), is then defined as
The TMR filter is iterated to remove the aforementioned artefacts. In order to control the iterations of the TMR filter, we compute at each iteration a convergence map, written C and defined at each pixel as follows:
applied to pixels for which the convergence map is greater than the threshold τ.
where ||.|| stands for the Euclidean distance in R^n ,
where N (x) = x+N (0) ⊂ Ω with N (0) a spatial neighborhood of 0,
where σ is a tuning parameter of the method and
C(x) is the normalization constant c(x) = Σ_{y ∈ N (x)} w_u (x, y) .
Observe that if we apply Y_u to the image u, we obtain the Yaroslavsky filter.
The regularization of the image T(u), referred to as Transportation Map Regularization (TMR), is then defined as
TMR_u ( T(u) ) := u + Y_u ( M(u) ) = Y_u ( T(u) ) + u − Y_u (u) .
The TMR filter is iterated to remove the aforementioned artefacts. In order to control the iterations of the TMR filter, we compute at each iteration a convergence map, written C and defined at each pixel as follows:
C(x) = || Y_u^k [ M(u(x)) ] − Y_u^(k-1) [ M(u(x)) ] || .
We then consider that there is numerical convergence in pixel x when C(x) < τ, and the TMR filter is onlyapplied to pixels for which the convergence map is greater than the threshold τ.
Experimental settings
For all the following experiments, the parameters have been set to:
- σ = 10 ,
- ρ = 10 ,
- τ = 1
For more details, see [1] and [2].
'Book'
experiment
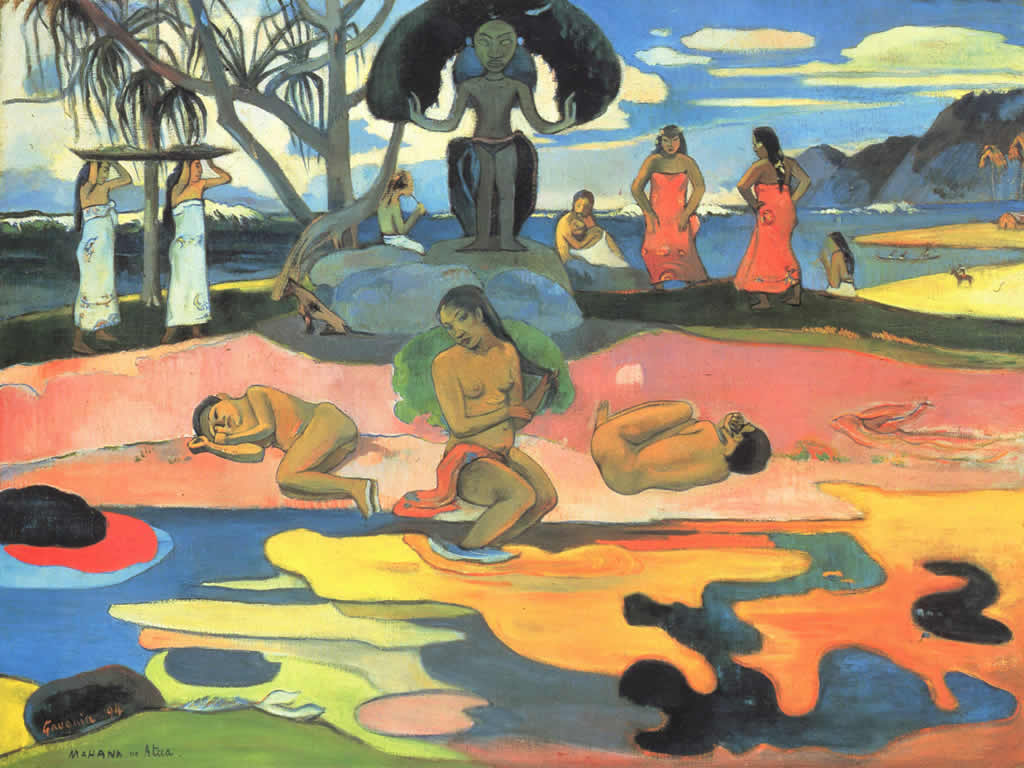
'Renoir-Gauguin' experiment

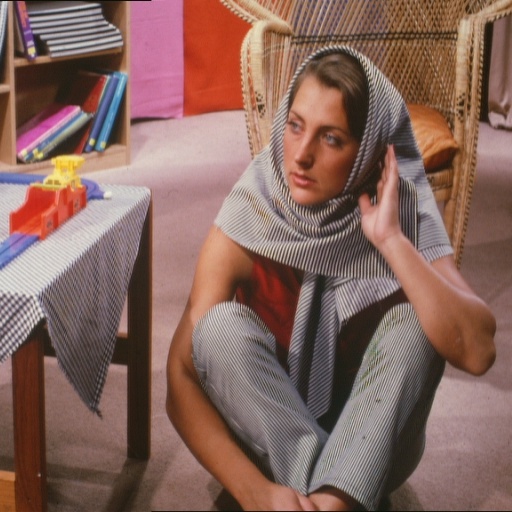
'Lena-Barbara' experiment

'ClownFish-SeaScape' experiment


'Lena-Olive' experiment 

'Budgerar-Parrot' experiment


'Oxford-NewYork' experiment


'Renoir-Gauguin' experiment
'Lena-Barbara' experiment
'ClownFish-SeaScape' experiment
'Lena-Olive' experiment
'Budgerar-Parrot' experiment
'Oxford-NewYork' experiment